Introduction to Differentiation
.
Function ?
Function ဆိုတာ တိုက်ရိုက် ဘာသာပြန်ရင် လုပ်ဆောင်ချက်ပါပဲ။ ၂ ထပ် တိုးချင်တယ်။ ၂ ထပ် တိုးတဲ့ ဖန်ရှင် f(x) = x² ရေးထားလိုက်။ တိုးချင်တဲ့ တန်ဖိုးကို ကိန်းရှင် variable x နေရာ အစားထည့်လိုက်။ f(x) ထဲ ထည့်လိုက်ရင် ၂ ထပ် တန်ဖိုး ရပါတယ်။
What is differentiation ?
Function က variable တစ်ခုခုဟာ တန်ဖိုး တစ်ခုခုကို ချဉ်းကပ်သွားရင် function ကိုယ်တိုင်လည်း တန်ဖိုးတစ်ခုခုကို ချဉ်းကပ်သွားမယ်။ ဒါကို limit လို့ ခေါ်ပါတယ်။
lim ᵢ→∞ f(i) = L ဆိုရင် i က အနန္တကိန်းကို ချဉ်းကပ်ပြီး တဖြည်းဖြည်း တိုးလာရင် ဖန်ရှင်တန်ဖိုးကြီးကလည်း L ကို ချဉ်းကပ်သွားမယ်။
ဒါဟာ variable တန်ဖိုးပြောင်းလို့ ဖန်ရှင်ပြောင်းသွားတဲ့ သဘောပဲ။ ဥပမာ ခရီးတစ်ခုဆိုပါစို့။ ခြေလှမ်းအကွာအဝေးဟာ variable ဖြစ်မယ်။ တစ်ခါလှမ်း ၁ ယူနစ်ဆို ခြေလှမ်း ၅၀ လှမ်းရမယ့် ခရီးက ယူနစ်ပေါင်း ၅၀ မှာ ခရီးဆုံးမယ်ပေါ့။ တကယ်လို့ တစ်ခါလှမ်း ၂ ယူနစ်ဆိုရင် ၂၅ လှမ်းပဲ လိုအပ်ပြန်ရော။
F(i) = 50/i
If i = 2 then F(i) = 25
ဒီလို ပြောင်းလဲတာကို ပြောင်းနှုန်း ဖန်ရှင်ရဲ့ rate of change ခေါ်မယ်။ ဟုတ်ပြီ ပုံမှာကြည့်။ 0 ကနေ Δx, 0 ကနေ Δy ပြောင်းသွားတယ်။ slope ပုံစံလေး ဖြစ်သွားတယ်။ အဲ့ဒီ slope ကလေးက rate of change ပါပဲ။

တကယ်လို့ Δx က သုညလောက်နီးနီး သေးငယ်သ့ားရင်ရော။ သုညကို ချဉ်းကပ်သွားရင်ရော။ ဒီလို အခြေအနေကိုတော့ differentiation ခေါ်ပါတယ်။
အဖြောင့် စနစ်မဟုတ်တဲ့ uniformly ဖြစ်တဲ့ ဂရပ်တစ်ခုကို မျဉ်းကွေးနဲ့ ဖော်ပြမယ်။ ဒါပေမယ့် ဒီမျဉ်းကွေးကို မျဉ်းဖြောင့်လေးတွေ အများကြီး ပေါင်းထားတာလို့ မြင်ကြည့်ပါ။ မျဉ်းဖြောင့်လေးတွေဟာ အလျား သိပ်ကို တိုတာမှ သုညကို ချဉ်းကပ်နေနိုင်တယ်။
ဒီတော့ slope လေးတွေ အများကြီးဖြစ်နေတယ်ပေါ့။ တနည်း rate of change တွေ အများကြီးပေါ့။
ဥပမာ ပုံထဲက y တနည်း function f(x) က x² ဆိုပါစို့။ သူ့ရဲ့ rate of change ကို လိုချင်ရင် f(x) ရဲ့ first order derivative ကို ရှာရမယ်။ first order derivative ဆိုတာကို ရှာတယ်ဆိုတာ ဘာလဲ။ differentiate လုပ်တာပါပဲ။
y =f(x) = x²
dy/dx = df(x)/dx = f'(x) = 2x လို့ ရမယ်။
ဒါဘယ်လိုရသလဲ။ တွက်ထုတ်ကြည့်ပါမယ်။
[1] Δx ကြောင့် f(x) ပြောင်းသွား။ f(x+Δx) ဖြစ်။
f(x) = x², so f(x+Δx) = (x+Δx)²
[2] Δx ကြောင့် ပြောင်းသွားတဲ့ f(x) တန်ဖိုးကို လိုချင်ရင် f(x+Δx) ထဲက f(x) ကိုနူတ်ပြီး Δx နဲ့ ပြန်စားရ။
(x+Δx)² - x² = 2xΔx+Δx²
Δx နဲ့ ပြန်စားရင် 2x+Δx ပဲကျန်မယ်။
df(x)/dx ဆိုတာမှာ ပြောင်းသွားတဲ့ အလျား Δx တန်ဖိုးကို သိပ်ကိုငယ်လွန်းလို့ သုညကို ချဉ်းကပ်ကြောင်း ဆိုခဲ့ပါပြီ။ ဒီတော့ df(x)/dx = 2x ပဲရပါတယ်။
ဒါကို differentiation မှာ fundamental rule တစ်ခုအနေနဲ့ သုံးပါတယ်။ dxⁿ/dx = nxⁿ⁻¹ လို့ မှတ်နိုင်ပါတယ်။ တစ်ကယ်လို့ ကိန်းသေပါနေတဲ့ function ဥပမာ f(x) = 2x² လိုဆို x² ကို differentiate ပြီးမှ 2 နဲ့ ပြန်မြှောက်ရပါတယ်။ တကယ်လို့ x ကို differentiate လုပ်မယ်ဆို 1 ပဲ ပြန်ရပါတယ်။ လုပ်ကြည့်ကြပါ။ Δx/Δx က 1 ပဲပြန်ရစေပါတယ်။
differentiation မှာ တွက်ချက်ရင် chain rule တို့ sum rule တို့လည်း သုံးရပါတယ်။
Sum Rule & Chain Rule
function နှစ်ခု ပေါင်းထားတာကို differentiate လုပ်မယ်ပေါ့။ ဒါ sum rule ကို သုံးရမယ်။ တစ်ခုစီကို ရှိတ်ပြီး ပေါင်းတယ်။ ဥပမာ dh(x)/dx မှာ h(x) = 2x²+5x³ ဆိုပါစို့။ f(x) = 2x², g(x) = 5x³ လို့ မြင်ပြီး differentiate ရမယ်။
d(f+g)/dt = d(f)/dt + d(g)/dt
ဥပမာ f(x) = (x+x²)² လိုမျိုး ဖြစ်နေတဲ့ function ဆို x+x² ကို g လို့ မြင်ပြီး df(x)/dg ကို အရင်ရှာရတယ်။ ပြီးမှ dg/dx ကို ရှာပေးရမယ်။ ဒါကို chain rule ခေါ်ပါတယ်။
df/dt = df/dg. dg/dt
Physics works !
Differentiation ဘယ်လို တွက်မလဲ။ ဘယ်ကလာသလဲ သိပြီဆိုတော့ physics မှာ differentiation ကို ဘယ်လို သုံးသလဲ ဥပမာပေး ပြောပါမယ်။
ဝတ္ထုတစ်ခုဟာ ရွေ့လျားနေပြီဆိုတာနဲ့ အချိန် Δt အတွင်း အရွေ့ x = f(t) က Δx လေးတွေ လိုက်လိုက် ပြောင်းတယ်။ ဒါကို အဲ့ဒီ ဝတ္ထုရဲ့ ရုတ်ချည်းအလျင်လို့ ခေါ်မယ်။ ဝတ္ထုရဲ့ ရုတ်ချည်းအလျင်ဆိုတာ အရွေ့ ပြောင်းနှုန်း the rate of change of displacement ပဲ မဟုတ်လား။ အချိန်အတိုင်းအတာ သေးသေးလေး တစ်ခုစီမှာ လိုက်လိုက်ပြောင်းနေတာပဲလေ။ အလျင်ဆိုလို့ မရောဖို့က ပျမ်းမျှအလျင်နဲ့ ရုတ်ချည်းအလျင်ပါ။ average velocity ဆိုတာ ခရီးတစ်ခုလုံးကိုတည် ခရီး တစ်ခုလုံးအတွက် ကြာချိန်နဲ့စားတာ။ instantaneous velocity လို အချိန်နဲ့လိုက်ပြောင်းနေတဲ့ အရွေ့သဘောကို ပြောတာ မဟုတ်ဘူး။ တကယ့် အလျင် concept က instant ဖြစ်တယ်။
အလျင်ဆိုတာ အချိန်နဲ့ လိုက်ပြီး တည်နေရာ ပြောင်းနေတာကို ခေါ်ပါတယ်။ စက်ဘီးဟာ ပထမ တစ်စက္ကန့်မှာ ငါးကိုက် ဒုတိယ တစ်စက္ကန့်မှာလည်း ငါးကိုက် တတိယတစ်စက္ကန့်မှာလည်း ငါးကိုက် ဒီလို တစ်စက္ကန့်ခြားလေးတိုင်း ငါးကိုက် သွားနေရင် ဒါဟာ မူသေအလျင်ပဲ။ မူသေအမြန်လို့လည်း ခေါ်နိုင်တယ်။ မူသေအမြန် တစ်စက္ကန့်လျှင် ငါးကိုက်စီနှုန်းဖြင့်လို့ ဆိုနိုင်ပါတယ်။
v = dx/dt ( instantaneous velocity )
v = s/t ( average velocity )
နောက်ပြီး ဒစ်ဖရန်ရှိတ်လို့ ရလာတဲ့ ဒီအလျင်တန်ဖိုးကို နောက်တစ်ခေါက် ထပ်ရှိတ်မယ်။ တနည်း second order ရှာမယ်ပေါ့။ ဒါဆို အရှိန် accelaration ကို ရမယ်။ ပြောရရင် အရှိန်ဆိုတာ အလျင် မြန်/နှေးဖြစ်ပေါ်တာကို ခေါ်တာပါ။ တစ်နည်း အလျင်ပြောင်းလဲတဲ့နှုန်းကို အရှိန်လို့ ခေါ်တာပါ။ လျှောစောင်းလေးဆီ ရောက်တော့ မူသေတစ်စက္ကန့် ငါးကိုက်ကနေ ဆယ်ကိုက်လောက် ဖြစ်သွားတယ်။ ဒါအလျင် ( ဝါ ) အမြန်တိုးလာတာပဲ။ ဒီလို အလျင် တိုးလာတာဟာ အရှိန်ဖြစ်လာတာပဲ။ နောက်တစ်ခု ဆုတ်ရှိန်။ ဆုတ်ရှိန်ဆိုတာ စက်ဘီးက ချိုင့်ခွက်ထဲ ကျသွားတဲ့အခါ အလျင် လျော့သွားတယ်။ အမြန်လျော့ သွားတယ်ပေါ့။ ဒါလည်း အရှိန် တစ်ခုဖြစ်လာတာပါပဲ။ ဒါပေမယ့် ဒါကိုတော့ ဆုတ်ရှိန်လို့ ခေါ်ပါတယ်။
a = dv/dt = d²x/dt²
အရှိန်ဆိုတာ အလျင်ရဲ့ ပြောင်းလဲနှုန်း ဖြစ်လို့ အလျင် ပြောင်းလဲနှုန်းမရှိဘဲ အလျင်ဟာ ကိန်းသေဖြစ်နေရင် အရှိန်သုညပါ။ သင်္ချာနည်းအရ Constant ကို differentiate လုပ်ရင် 0 ရတာကို ရှေ့မှာလည်း သိခဲ့ပါပြီ။
မူလက တသတ်မတ်တည်း uniform ဆိုတဲ့ စကားစုက ဘာကိုဆိုလိုသလဲဆို အဲ့သလို ချိုင့်တွေ ခွက်တွေ အလျှောတွေ မရှိတဲ့ ပြင်ညီမျက်နှာပြင်လို့ ပြောချင်တာပါ။ တကယ်တော့ ချိုင့်တွေ ခွက်တွေ လျှောစောင်းတွေ မတ်နေတဲ့ ကုန်းတွေ မရှိဘူးဆိုတာ မူသေအလျင် တစ်နည်းဆို မူသေအမြန်နဲ့ သွားနေတာလို့ ပြောတာပဲ မဟုတ်လား။
ဒီတော့ အီနားရှားဆိုတဲ့ အယူအဆကို ပြင်ပက အားတစ်ခု သက်ရောက်မှု မရှိမချင်း ရပ်နေတဲ့ ဝတ္ထုဟာ ရပ်မြဲ ရပ်နေမယ်။ မူသေအလျင်နဲ့ ရွေ့နေတဲ့ ဝတ္ထုဟာ မရပ်မနား ဆက်လက်ရွေ့နေမယ့် ဂုဏ်သတ္တိလို့ သတ်မှတ်လိုက်ပါတယ်။ အဲ့ဒီလို ခွက်တွေ လျှောတွေ မရှိ ပြင်ညီကြီးမှာ ဝတ္ထုဟာ ရွေ့နေတယ်လို့ပဲ တွေးကြည့်ပါ။ ဒါဆို ဒီဝတ္ထုဟာ အမြဲရွေ့နေတော့မှာလား။ မရွေ့နိုင်သေးပါ။ သူ့ကို ရပ်စေမယ့် မသိမသာ အားလေး တစ်ခု ရှိပါသေးတယ်။ အဲ့ဒီ အားကိုတော့ ပွတ်မှုအား friction လို့ ခေါ်ပါတယ်။ friction ဆိုတာ အရွေ့ကို နှောင့်နှေးစေတာ ဖြစ်လို့ direction မှာအရွေ့နဲ့ တိုက်ရိုက် ဆန့်ကျင်ဘက်ကို ပြတယ်။
Friction မှာ ၂ ခု ရှိတယ်။ static friction နဲ့ dynamics friction တွေ။ static ဆိုတာ ရပ်နေတဲ့အခါ ရှိတဲ့ friction ကို ပြောတာ။ ခုစာဖတ်နေတဲ့အချိန် ထိုင်နေတယ်နော်။ ခင်ဗျားနဲ့ ထိုင်ခုံကြား static friction ရှိမယ်။ မတ်တပ်ရပ်နေလည်း ခြေထောက်နဲ့ မြေကြီးကြား ရှိမယ်။ dynamic friction ဆိုတာ ရွေ့နေတဲ့ ဝတ္ထုတွေအတွက်။ dynamic မှာတောင် ၂ ခု ထပ်ခွဲသေးတယ်။ sliding နဲ့ rolling။ sliding ဆိုတာ ဘေးတိုက်ရွေ့သွားတာ။ rolling ဆိုတာ လှိမ့်သွားတာ။ circular ဖြစ်တယ်။
ဆိုတော့ အားက အရွေ့ပေါ် သက်ရောက်မှုရှိတယ်။ ဆိုလိုတာက အလျင်ပေါ်လည်း သက်ရောက်တယ်။ အားကြောင့် အရွေ့ဖြစ်ပေါ်တယ်။ အားစိုက်ထုတ်မှုနဲ့ လိုက်ပြီး အလျင်ပြောင်းတယ်။ ဆိုလိုတာက အရှိန်ရတယ်။ ဒီတော့ နယူတန်ရဲ့ ဒုတိယနိယာမ F = ma ဖြစ်လာတာပါ။
∑ |F| = m|a| = m|dv/dt|
အခု motion in plane surface မှာ differential ကို သုံးတဲ့ အကြောင်း ပြောပြီးပြီဆိုတော့ oscillatory motion မှာ သုံးတဲ့အကြောင်း ပြောကြည့်ရအောင်ပါ။ oscillatory motion ဆိုတာ လှိုင်းလို ရွေ့တာပါ။ simple oscillatory motion မှာ အရွေ့ကို x(t) = sin(ωt) နဲ့ ဖော်ပြပါတယ်။
ဒီတော့ velocity ကို လိုချင်ရင် x(t) = sin(ωt) ရဲ့ derivative ကို ရှာရပါမယ်။ ရှာလိုက်တဲ့အခါမှာတော့ vₓ = ω cos(ωt) ဆိုပြီး ရမယ်။ ဒီ trigo function တွေကို ရှိတ်တဲ့အခါ သတိထားရမှာက ထောင့်တန်ဖိုးကို အရင်ရှိတ်တယ်။ d ωt/dt မှာ ω က ကိန်းသေဖြစ်နေတယ်။ ဟုတ်တယ်လေ။ oscillatory motion မှာ angular frequency ဖြစ်တဲ့ ω က ကိန်းသေပဲ။ ထောင့်ကို ရှိတ်ပြီးမှ trigo function ကို ရှိတ်ပါတယ်။ ဒီလိုပဲ။ accelaration ကို ရှာလို့ ရတယ်။
အခု တစ်လျှောက်လုံး ပြောလာတာက independent variable တစ်ခုတည်းရှိသေးတယ်။ သဘောကတော့ ဒါဟာ one dimensional ပဲ ရှိသေးတာ။ dx/dt မှာ x က dependent ဖြစ်တယ်။ t က independent ဖြစ်တယ်။ ဒီလို differential မျိုးကို ordinary differential လို့ခေါ်ပါတယ်။
Multivariable ?
Multivariable ဆိုတဲ့အတိုင်း variable က တစ်ခုထက်မက ပါတယ်။ ဥပမာ ဆိုပါစို့။ function V ပေါ့။ function V မှာ x,y,z ဆိုတဲ့ variable ၃ ခုတောင်ပါမယ်ဆို V(x,y,z) လို့ ရေးတယ်။ x ကြောင့် V ပြောင်းတယ်ဆို rate of change ကို ∂V/∂x လို့ ရေးပါတယ်။ x က ပြောင်းပေမယ့် y,z က fixed ဖြစ်နေတယ်။ မပြောင်းပါ။ ဒါကြောင့် (∂V/∂x)y,z လို့လည်း ရေးနိူင်တယ်။
∂V/∂x =lim ^ʸ→⁰ ΔV/Δx ပါ။
∂²V/∂x² = ∂x(∂V/∂x) = ∂ₓ,ₓV
∂²V/∂x∂y = ∂x (∂V/∂y) = ∂ₓ,yV
∂²V/∂x∂y = ∂²V/∂y∂x
PDE တွေကို higher dimension တွေမှာ rate of change တွေ ရှာဖို့ကို သုံးတယ်။ တကယ်တော့ PDE ဆိုတာ အခြေခံအားဖြင့် သဘောတရားချင်း အများကြီး ကွာလှတာတော့ မဟုတ်ပါဘူး။
ဒီ PDE တွေကို Hessian Matrix လို့ ခေါ်တဲ့ matrix ပုံစံနဲ့လည်း ပြပါတယ်။ ဆိုပါတော့ A(x,y) အတွက်ဆို
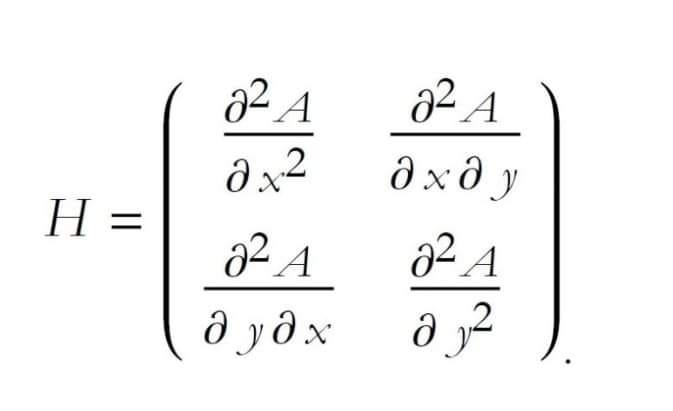
Det Of H = ∂²A/∂x².∂²A/∂y² - ∂²A/∂y∂x.∂²A/∂x∂y
Tr H = ∂²A/∂x² + ∂²A/∂y²
Determinant ရော Trace ရော အပေါင်းဆို အဲ့အမှတ်က local minima ဖြစ်တယ်။ second order derivative d²f(x)/dx² က > 0 ဖြစ်တဲ့ အမှတ်ပါ။
Determinant က အပေါင်းဖြစ်ပြီး trace က အနုတ်ဆို local maxima ဖြစ်တယ်။ second order derivative d²f(x)/dx² က < 0 ဖြစ်တဲ့ အမှတ်ပါ။ Optimization လုပ်တဲ့ အပိုင်းတွေမှာ global optima အထိ ရှာရပါတယ်။
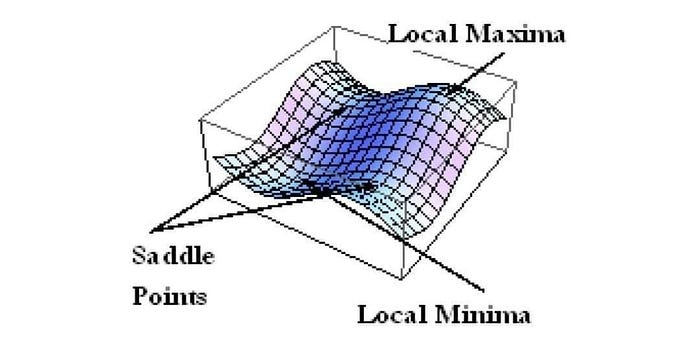
Determinant က အနုတ်ဆို saddle point လို့ ခေါ်မယ်။ second order derivative d²f(x)/dx² က = 0 ဖြစ်တဲ့ အမှတ်ကို point of inflection ခေါ်ပါတယ်။ ဒီအမှတ်ဟာ stationary point ဖြစ်နေရင် တနည်း df(x)/dx = 0 ဖြစ်နေရင် saddle point လို့ ခေါ်ပါတယ်။
Ref :
Susskind, Leonard : Theoritical Minimum